はじめに
こんにちは,中村研所属のM2の船﨑友稀奈です.
報告が遅くなりましたが,2022/6/26~7/1に開催されたHCI INTERNATIONAL 2022にて発表を行なってまいりました.
HCII2022で発表した内容は,2019年の12月にSIGHCI185で発表した研究内容を整理および発展させ,英語化した内容です.よろしければそちらもご覧ください.
研究概要
皆さんは普段から車の運転をされるでしょうか? 私は2019年に日本語の論文を出した時には免許取り立てほやほやでしたが,3年近く経った今ではかなり運転に慣れて車を乗り回すようになりました.
さて,過去の私のような運転初心者やしばらく運転をしていなかったという方には,車を運転するということに不安や抵抗があると思います.その中には右折が苦手だと感じる人や,細い道は通りたくないなと考えることもあるかもしれません.私たちに道路推薦をしてくれる現在のナビゲーションシステムでは,距離や渋滞状況,料金といった環境的な要因のみで,ドライバの技量や心理に合わせたナビゲーションは存在していません.
ドライバの特性をモデルとして表すことができれば,各ドライバに合わせたカーナビゲーションが実現できるようになります.現実世界のモデル化というと実車での実験を考えるかもしれませんが,実車での実験は場所や時間の制約が多く関わり,天候や人通りなどの走行環境が変化する可能性があります.実験条件を統一し,同条件の試行何度も行うことでモデル化が可能になりますが,既存のドライビングシミュレータは実験条件によって自由に道路をカスタマイズでき,同条件の試行を何度も行うシステムは存在していません.また,ドライバの技術レベルを推定することができないため,各ドライバに合った道路推薦をすることができません.
そこで我々はまずモデル化を行うために何度も繰り返し同条件の道を走行することができるシステムの実装と,実装したシステムを用いてドライバの習熟度を推定する特徴量にどのようなものがあるかを確かめるため調査を行いました.今回の実験では計測時間とハンドルの振れ幅の2点が運転習熟度の特徴量になるのではないかという仮説を立て検証を行いました.
実装したシステムの挙動は下の動画のような感じになります.左右にガードレールが設置してあり,接触した場合は事故(エラー)として処理され,すぐに次のカーブへ遷移し,エラーしたカーブは1試行の最後に提示するようにしました.ガードレールの奥には建物や木を配置することができ,画面内のハンドルは実験に使用したハンドルコントローラに合わせて回転するように設定しました.
このシステムを用いて,0°,30°,60°,90°,120°の右左折9種類の単一カーブという条件で実験を行いました.詳しい実験内容は論文をご覧ください.
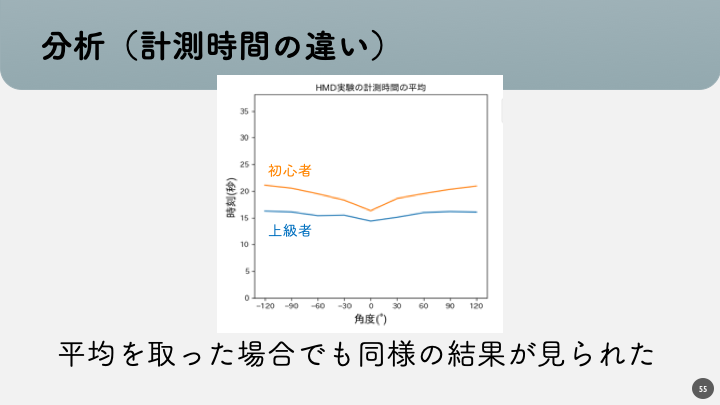
今回はカーブの計測時間とハンドルの振れ幅に注目して分析を行いました.実験の結果,
- 初心者はカーブの角度が大きい程計測時間が長くなり,角度が小さい時に計測時間が短くなる.
- 上級者と比較し,初心者の方がカーブあたりのハンドル回転量の総量が多くなる.
となり,カーブにおける計測時間とハンドルの振れ幅(回転量の総量)は初心者にとっての運転特徴量となることがわかりました.上級者の計測時間は初心者と比べ,グラフが直線的になり,カーブ角度に左右されずに走行できていました.この結果は実験条件でカーブの半径を固定して実験を行った影響だと考えられます.カーブ角度が変化しても,カーブ半径が統一だったため,運転慣れしている上級者にとっては難易度に変化がなかったのではないかと考察しました.
今回の研究では,モデル化を行うために同条件の道を走行できる実験システムの実装とシステムを用いて運転習熟度を推定するための特徴量の調査を行いました.その結果,計測時間とハンドル回転量の総量という初心者にとっての運転特徴量を抽出ができました.しかし,実験機材やシステムの挙動においてまだ改善点があること,カーブの半径などの検証すべき要因が他にもまだあることから,今後とも研究を行っていきたいと考えています.
文献情報
スライド
感想
初めての国際学会だったためとても緊張したことを覚えています.
オンラインでの発表だったので,いつものように10分くらい前にzoomに入っていたのですが,座長さん以外誰も居らず,英語が話せないのに5分近く外国人の座長さんに話しかけられてテンパりまくったことがかなり印象的でした.
新型コロナウイルスの関係で現地のスウェーデンに行くことができなかったのでいつか行ってみたいです.