はじめに
中村研究室学部3年生の熊谷航太です。
2026年3月16~18日に沖縄産業支援センターで開催されたMVE研究会にて研究発表を行いましたので、ご報告させていただきます。今回は「ドライビングシミュレータにおける対向車の速度が認知的狭さにおよぼす影響」というタイトルで発表させていただきました。
研究概要
背景
現在のカーナビゲーションシステムには、目的地までの経路推薦や到着時間の予測という機能が備わっています。しかし、カーブの多い道や幅の狭い道などを通る時には、運転負荷が増大し、実際の走行難易度が単純な距離や時間で評価できないことが考えられます。そういった道を効率よく運転するために、様々な道路条件での運転する難しさを数値化・モデル化し、ナビゲーションシステムへの応用することが期待されます。
私たちはこれまで、様々な道路条件における運転難易度のモデル化を行ってきました。その中の一つに「ドライビングシュミレータにおける路上駐車のドア開閉が認知的狭さに及ぼす影響について」というタイトルの研究があります。
実験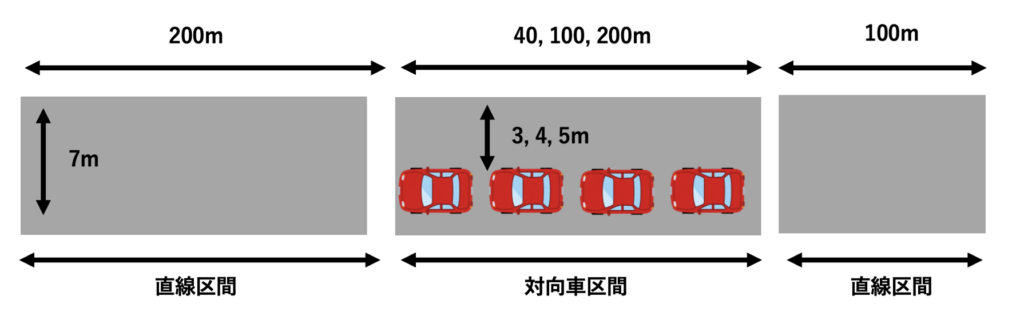
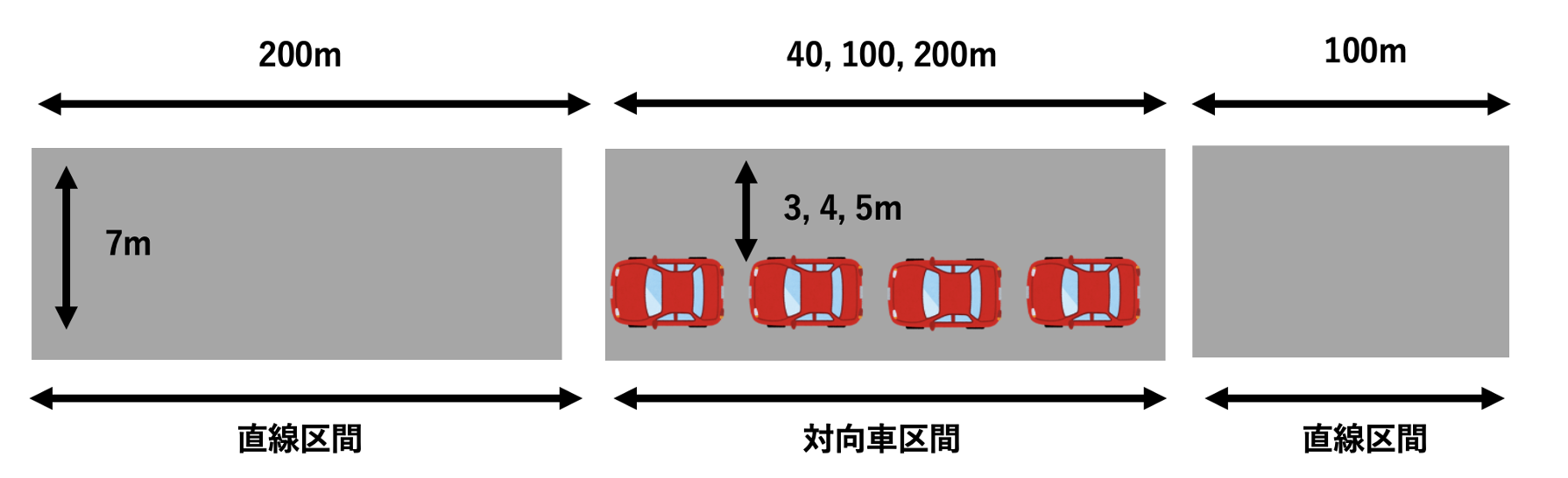
実験は、上記のようなコースをVR空間上で再現し、ドライビングシミュレータを用いて行いました。コース自体の幅は7mで固定し、対向車によって狭まる幅(3m, 4m, 5m)と経路長(40m, 100m, 200m)の組み合わせの9種類があります。さらに、対向車の速度(0km/h, 60km/h)の条件も加えた2*9=18条件で実験を行いました。
実験を通して得られたデータから、条件ごとの平均通過時間やエラー率に関する分析を行いました。
結果
平均通過時間
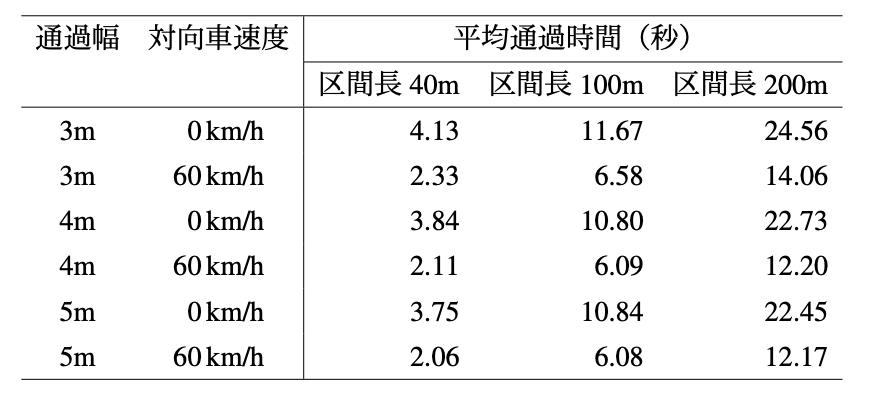
こちらがそれぞれの条件ごとの、対向車区間の平均通過速度の表になっています。この表から、通過幅が狭い条件ほど対向車区間を通過するのに時間がかかることがわかりました。また、対向車速度が60km/hの条件では0km/hの条件と比較して、平均通過時間が短くなることがわかりました。
エラー率
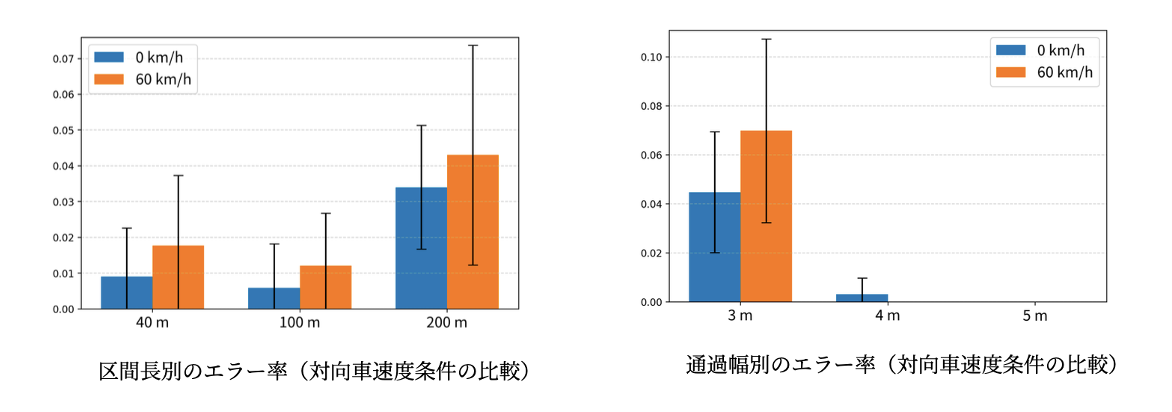
上記の図は、各区間長と通過幅における走行時のエラー率を示したものです。左の図からどの区間長の条件においても、対向車の速度が0km/hの条件に比べて、60km/hの条件の方がエラーが多いことがわかりました。また、右の図からほとんどのエラーが通過幅 3mの条件で発生していることがわかりました。
モデル化の検証
そこで本研究では通過時間ではなく走行速度に着目し、平均速度モデルとして定式化を行いました。
本モデルは、ステアリングの法則を参考に構築しました。
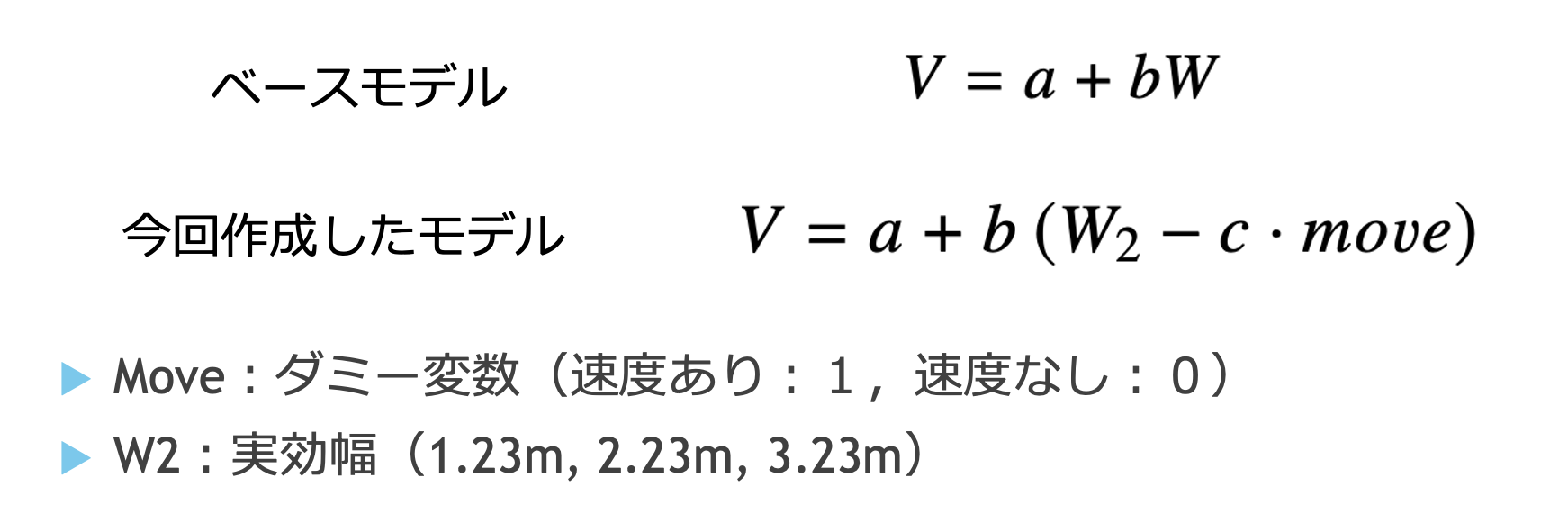
本モデルから、対向車が存在する道路条件における走行速度を十分に推定できることが示されました。
論文の詳細
発表スライド
感想

今回は初めての学会発表で緊張もありましたが、なんとか無事終えることができました。
久しぶりの沖縄は食も景色も最高でした!
最後になりますが、研究の相談や原稿執筆、発表練習の指導をしてくださった中村先生ならびに先輩方に、心より感謝申し上げます。